OpenAI/Triton MLIR 迁移工作简介
triton system techTable of Contents
经过几个月的不懈努力,OpenAI Triton已经成功完成了面向MLIR Infra的迁移/重构工作,并将其最新的基于MLIR的代码合并至主分支。这个工作是由OpenAI和NVIDIA相关团队近几个月来深入合作完成的,而我也有幸参与其中。在这篇文章中,我将分享一些技术总结,记录一些收获和思考。
尽管Triton目前的开源开发非常迅速,但本文将主要聚焦于基于MLIR Infra进行重构的第一个版本的代码(这应该也是两三个月前的)
Triton 简介
OpenAI Triton paper 中的介绍是 “An Intermediate Language and Compiler for Tiled Neural Network Computations”,其中几个关键词应该能够代表其特点:
- Intermediate Language, 目前是基于 Python 的 DSL
- Compiler ,是一个经典的 Compiler 的架构
- Tiled Computation,面向 GPU 体系特点,自动分析和实施 tiling
定位
由于 Triton 的开发非常迅速,这里只讨论当前 Triton 的功能。
简而言之,Triton 提供了一套针对 GPU Kernel 的开发的 Language(基于 Python) 和 高性能 Compiler。
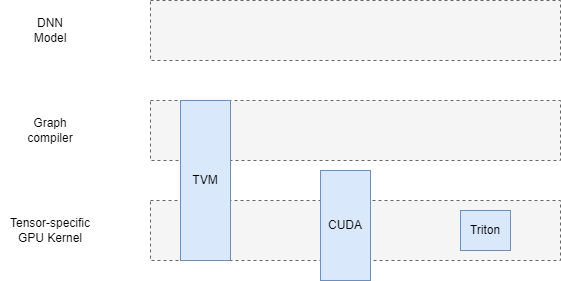
因此,就层次而言,Triton的 DNN 开发能力与 CUDA 的部分相对应,但与TVM、XLA等直接面向 DL 的 Domain compiler 无法完全对应。 后者更像是面向 DL 的武器库,拥有从构图到 auto fusion 等端到端的能力,而Triton则更像一把小巧、实用的瑞士军刀,面向偏底层的也是最通用的 Kernel 开发问题。
新代码中的架构
Triton 新代码中的架构总体上可以如下呈现

即总体上可以分为三大块
- Frontend,将用户的 Python kernel code 转换为 Triton IR,以及维护 kernel launch 的 Runtime
- Optimizer,通过各类 pass 将 Triton IR 逐步转换为优化过的 TritonGPU IR
- Backend,将 TritonGPU IR 逐步转换为 LLVM IR,并最终通过 ptxas 编译为 cubin
贯穿这三部分的核心表示是 Triton 的 IR,微观上,IR 也分为两个层次
- Triton Dialect,表示计算逻辑,硬件无关的表达
- TritonGPU Dialect,GPU 相关的计算表示
这两者都是基于 MLIR 的自定义 dialect,除此之外,Triton 也复用了很多社区的 dialect 来进行宏观的表示,包括
stddialect: tensor, int, float 等数据类型arithdialect:各类数学操作scfdialect:if, for 等控制流nvvmdialect:获取thread_id等少量操作gpudialect:printf 等少量操作
下图是 Triton 中核心表示完整的转换过程:
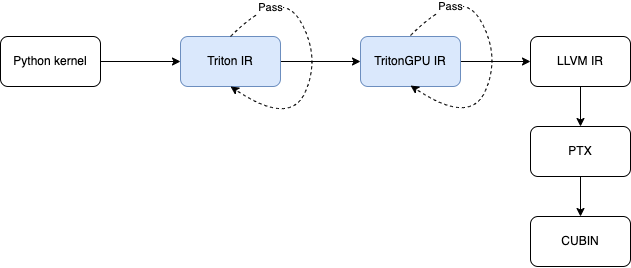
其中蓝色的两部分主要是 MLIR 体系涉及的部分,随后 MLIR 会转换为 LLVM IR,之后 Triton 会调用 NVPTX 转换为 PTX Assembly,随后由 CUDA 的 ptxas 编译器编译为 cubin。
Python 界面之 Frontend
Frontend 用于将用户用 Python 编写的 kernel 转换为对应的 Triton IR (Triton Dialect),这里由于篇幅不便展开,细节可以阅读 compiler.py::CodeGenerator 中基于 Python ast 的规则。
比如 vector add 的例子
@triton.jit
def add_kernel(x_ptr, y_ptr, output_ptr, N,
BLOCK_SIZE: tl.constexpr):
pid = tl.program_id(0)
block_start = pid * BLOCK_SIZE
offsets = block_start + tl.arange(0, BLOCK_SIZE)
mask = offsets < N
x = tl.load(x_ptr + offsets, mask=mask)
y = tl.load(y_ptr + offsets, mask=mask)
output = x + y
tl.store(output_ptr+offsets, output, mask=mask)
# x, y are torch.Tensor
grid = lambda meta: (triton.cdiv(n_elements, meta['BLOCK_SIZE']),)
add_kernel[grid](x, y, output, n_elements, BLOCK_SIZE=1024)
相应会得到 Triton IR
func public @kernel_0d1d2d3d(
%arg0: !tt.ptr<f32> {tt.divisibility = 16 : i32},
%arg1: !tt.ptr<f32> {tt.divisibility = 16 : i32},
%arg2: !tt.ptr<f32> {tt.divisibility = 16 : i32},
%arg3: i32 {tt.divisibility = 16 : i32}) {
%c256_i32 = arith.constant 256 : i32
%0 = tt.get_program_id {axis = 0 : i32} : i32
%1 = arith.muli %0, %c256_i32 : i32
%2 = tt.make_range {end = 256 : i32, start = 0 : i32} : tensor<256xi32>
%3 = tt.splat %1 : (i32) -> tensor<256xi32>
%4 = arith.addi %3, %2 : tensor<256xi32>
%5 = tt.splat %arg0 : (!tt.ptr<f32>) -> tensor<256x!tt.ptr<f32>>
%6 = tt.addptr %5, %4 : tensor<256x!tt.ptr<f32>>
%7 = tt.splat %arg1 : (!tt.ptr<f32>) -> tensor<256x!tt.ptr<f32>>
%8 = tt.addptr %7, %4 : tensor<256x!tt.ptr<f32>>
%9 = tt.splat %arg3 : (i32) -> tensor<256xi32>
%10 = arith.cmpi slt, %4, %9 : tensor<256xi32>
%11 = tt.load %6, %10
%12 = tt.load %8, %10
%13 = arith.addf %11, %12 : tensor<256xf32>
%14 = tt.splat %arg2 : (!tt.ptr<f32>) -> tensor<256x!tt.ptr<f32>>
%15 = tt.addptr %14, %4 : tensor<256x!tt.ptr<f32>>
tt.store %15, %13, %10 : tensor<256xf32>
return
}
可以看到,Triton IR 几乎一比一地对应到原始的 Python code,将用户定义的 computation 带入 MLIR 的体系,后续会在此基础上做各类优化(by Optimizer)以及最终 translate 到更低层次的表示中(by Backend)。
性能优化之 Optimizer
Optimizer 用于分析和优化 Frontend 传入的 IR,通过各类 Transformation 和 Conversion (Pass) 策略,最终传递给 Backend 做 translate。
Optimizer 大致的 workflow 如下
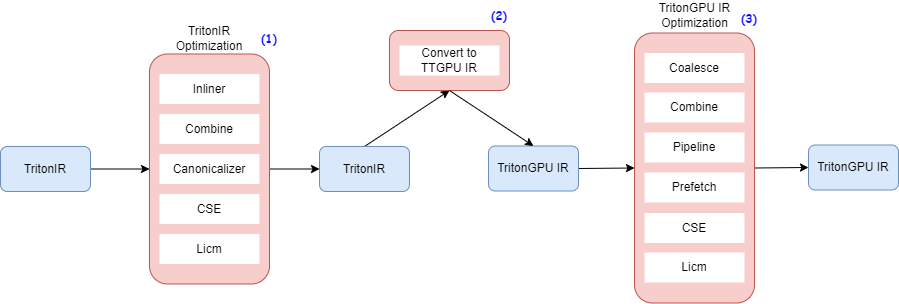
主要分为三大块优化
- TritonIR 的优化
- TritonIR to TritonGPU IR 的 Conversion
- TritonGPU IR 的优化
贯穿中间的数据结构是 TritonGPU IR,顾名思义是带上了 GPU 相关的信息的 IR。
TritonGPU Dialect
TritonGPU Dialect 相比 Triton Dialect,主要是增加了 GPU 硬件相关的 Op 和 Type。
相关的主要 Op 如下
async_wait(N:int) -> (), 直接对应到 PTX 中的cp.async.wait_group N指令alloc_tensor()->Tensor, 表明 allocate 一个处于 shared memory 的 tensorinsert_slice_async(slice:PtrTensor, dst:Tensor, index:int, mask:i1 ...) -> Tensor, 表明往 (alloc_tensor op 产生的,shared memory中的) tensor 中 insert 一个 slice,并且这个操作是 async 的convert_layout(src:Tensor)->Tensor,转换 Tensor 中的 data layout
前三个 Op 主要在 Pipeline 和 Prefetch 的优化(下文 Pass 中会涉及)中用到, convert_layout Op 在 TritonGPU Dialect 中的 Type system 比较关键,以下两个小节会重点详解。
Data layout
Data layout 是 TritonGPU Dialect 的 Type system 的关键,确定了 Data(各层级memory中的Tensor) 到 thread 之间的映射关系。
目前 Triton 中有如下几种
- Blocked Layout
Blocked Layout 表示 thread 间平均分配 workload 的情况,每个线程 own 一块 memory 上连续的 data 进行处理。
其包含了如下三个字段用于帮助确定 thread 和数据之间的映射关系:
- sizePerThread:每个 thread 处理的 连续排布 的元素数目
- threadsPerWarp:每个 Warp 在不同维度上的线程数,用向量表示
- warpsPerCTA:每个 CTA 对应的 Warp 数目,这个由用户在 Python 层制定
按代码中的例子
For example, a row-major coalesced layout may partition a 16x16 tensor over 2 warps (i.e. 64 threads) as follows. [ 0 0 1 1 2 2 3 3 ; 32 32 33 33 34 34 35 35 ] [ 0 0 1 1 2 2 3 3 ; 32 32 33 33 34 34 35 35 ] [ 4 4 5 5 6 6 7 7 ; 36 36 37 37 38 38 39 39 ] [ 4 4 5 5 6 6 7 7 ; 36 36 37 37 38 38 39 39 ] ... [ 28 28 29 29 30 30 31 31 ; 60 60 61 61 62 62 63 63 ] [ 28 28 29 29 30 30 31 31 ; 60 60 61 61 62 62 63 63 ] for #triton_gpu.blocked_layout<{ sizePerThread = {2, 2} threadsPerWarp = {8, 4} warpsPerCTA = {1, 2} }>
- Shared Layout
Shared Layout:表示数据在 shared memory 的一些特性,比如 swizzle 访问的一些参数。
其包含了如下字段
- vec, 支持 vectorization 的单位
- perPhase, 每个 phase 包含多少个 vec
- maxPhase, tensor 总共包含多少个 phase
- order, axis 的次序
其中,vec, perPhase, maxPhase 是用于避免 bank conflict 的 swizzle 操作需要的参数。
代码中的例子:
In order to avoid shared memory bank conflicts, elements may be swizzled in memory. For example, a swizzled row-major layout could store its data as follows: A_{0, 0} A_{0, 1} A_{0, 2} A_{0, 3} ... [phase 0] \ per_phase = 2 A_{1, 0} A_{1, 1} A_{1, 2} A_{1, 3} ... [phase 0] / groups of vec=2 elements are stored contiguously _ _ _ _ /\_ _ _ _ A_{2, 2} A_{2, 3} A_{2, 0} A_{2, 1} ... [phase 1] \ per phase = 2 A_{3, 2} A_{3, 3} A_{3, 0} A_{3, 1} ... [phase 1] /
- MMA Layout
顾名思义,MMA Layout 表示 Tensor Core 中 MMA 指令结果的 data layout,比如 Ampere 对应的 MMA Layout 的数据排布基本可以对应到 PTX 指令中的 mma.m16n8k16 的 C,D 的排布。
MMA Layout 主要包含两个字段:
version,表示 TensorCore 的版本- 1 为 Volta
- 2 为 Ampere
warpsPerCTA
这里演示 FP16 精度下,
version=2的数据排布(会映射到mma.m16n8k16指令)的 Accumulators (C or D) 的 数据排布。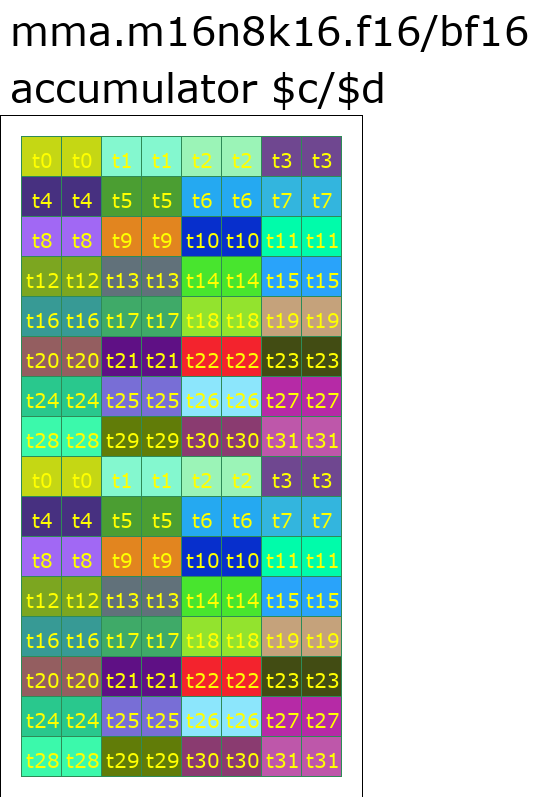
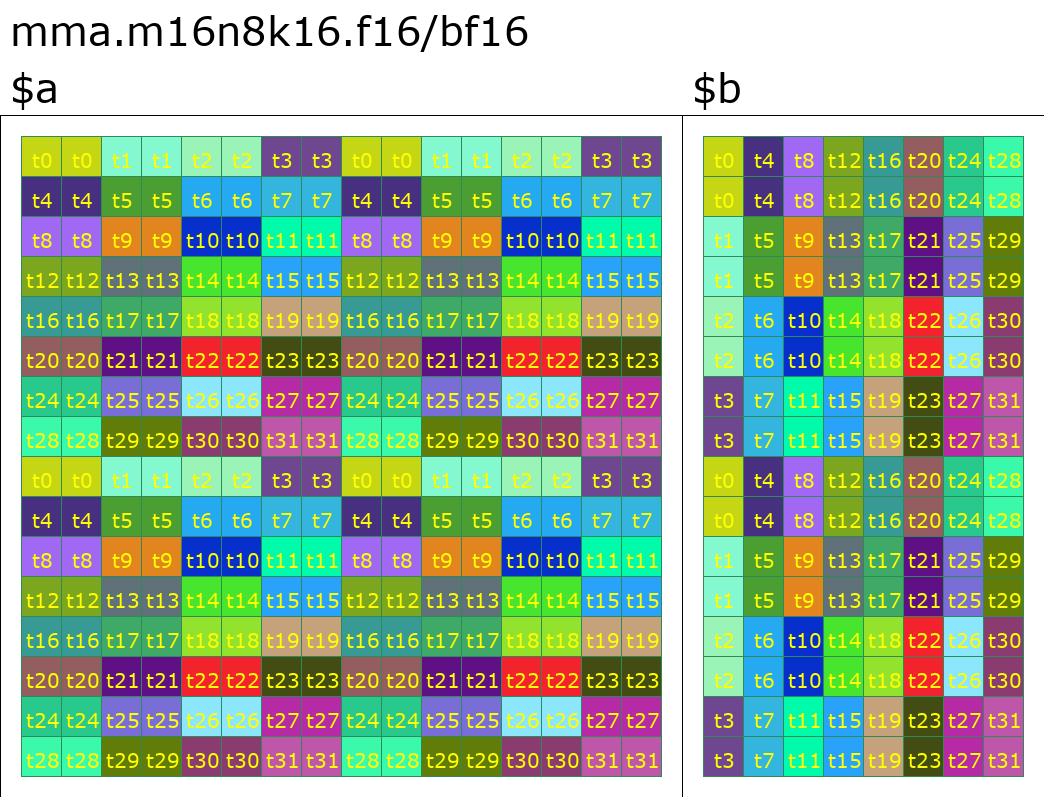
- DotOperand Layout
DotOperand Layout 用来表示 Triton 的 DotOp 的输入的 layout。
其主要包含如下信息
opIdx, Operand 的 IDopIdx=0表示 DotOp 的 $aopIdx=1表示 DotOp 的 $b
parent,存储其对应的 MMA Layout,这里 DotOperand 的数据排布也可能间接的由 MMA Layout 确定(如果 DotOp lower 到 MMA 指令)或者 Blocked Layout(如果 DotOp lower 到 FMA 指令)
这里为了方便演示,我们采用 MMA Layout 中的
mma.m16n8k16.f16指令计算精度为 FP16
MMA Layout
version=2warpsPerCTA=[8,4]
对于 $a,对应的 DotOperand 的 opIdx = 0
$b, 对应的 DotOperand 的 opIdx = 1
- Slice Layout
Slice Layout 表明单个维度上的数据反向索引
ConvertLayoutOp
顾名思义,ConvertLayoutOp 就是用来讲 Tensor 从一种 data layout 转换到另外一种 data layout。 由于 data layout 是 TensorType 的一部分,很自然会存在类型(其中layout)需要转换的情况,这就是 ConvertLayoutOp 的作用。
有了上面的 Data Layout,接下来我们看最简单的 MatMul 中的的 IR:
#blocked0 = #triton_gpu.blocked<{sizePerThread = [1, 8], threadsPerWarp = [16, 2], warpsPerCTA = [1, 1], order = [1, 0]}>
#blocked1 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [4, 8], warpsPerCTA = [1, 1], order = [1, 0]}>
#mma = #triton_gpu.mma<{version = 2, warpsPerCTA = [1, 1]}>
// ...
%37 = tt.load %arg8 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16xf16, #blocked0>
%38 = tt.load %arg9 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8xf16, #blocked1>
%39 = triton_gpu.convert_layout %37 : (tensor<16x16xf16, #blocked0>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>
%40 = triton_gpu.convert_layout %38 : (tensor<16x8xf16, #blocked1>) -> tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>
%41 = tt.dot %39, %40, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>> * tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>> -> tensor<16x8xf32, #mma>
// ...
上面是截取了一段经典 MatMul 中某个阶段的 TritonGPU IR,逻辑比较直白,定义了 #blocked0, #blocked1 和 #mma 三种 layout,之后通过 tt.load 将 DotOp 的两个 Operand 从 GEMM 加载数据到 register files,之后两个 triton_gpu.convert_layout 转换 layout 为 DotOp 的参数需要的 #triton_gpu.dot_op layout。
这里列举一些典型的 data layout 的转换,以及特点:
#shared -> #blocked,正常是代表数据从 shared memory 被 load 到 register file 中,需要考虑 swizzle#blocked -> #shared,代表数据从 register file 存储到 shared memory 中,需要上一步相同的 swizzle 方式#mma -> #blocked,正常是 DotOp 的输出转换为更简单的 layout 来进一步计算,由于涉及到跨 thread 间的数据传递,因此一般会借由 shared memory 中转一次#blocked -> #dot_operand,转换为 DotOp 的输入,这一步可能也需要 shared memory 中转
Triton 中几乎实现了任意 data layout 间的转换,当然不同的转换代价也不尽相同(考虑到是否会用到 shared memory,register 增减量等等),因此转换的代价也会在 Optimizer 里面一并考虑。
TritonIR 的优化
TritonIR 上的优化主要是计算本身的,与硬件无关的优化,包含了如下 Pass
- Inliner Pass,将 Kernel Call 的子函数 Inline 展开
- Combine Pass,一些特定的 Pattern rewrite,比如
select(cond, load(ptrs, broadcast(cond), ???), other) => load(ptrs, broadcast(cond), other)
- Canonicalizer Pass,一些化简的 Pattern rewrite
- CSE Pass,MLIR 的 cse Pass,用于 Eliminate common sub-expressions
- LICM Pass,MLIR 的 LoopInvariantCodeMotion Pass ,将循环无关的变量挪到 forloop 外面
TritonGPU IR 的优化
TritonGPU IR 上的优化在计算本身优化外,新增了 GPU 硬件相关的优化,具体的 Pass 列表如下
- ConvertTritonToTritonGPU Pass,将 Triton IR 转换为 TritonGPU IR,主要是增加 TritonGPU 特有的 layout
- Coalesce Pass,重排 order,使得最大 contiguity 的维度排在最前面
- Combine Pass,同 Triton IR
- Pipeline Pass,MMA 指令对应的 global memory 到 shared memory 的 N-Buffer 优化,下文详解
- Prefetch Pass,MMA 指令对应的 shared memory 到 register file 的 N-Buffer 优化,下文详解
- Canonicalizer,同 Triton IR
- CSE Pass,同 Triton IR
- LICM Pass,同 Triton IR
Pipeline Pass
Pipeline Pass 和下一小节中的 Prefetch Pass 是配合关系,整体用来为 DotOp (mma 指令) 的 Operand 提供 IO 优化。
Pipeline 优化主要针对 DotOp 中 GEMM 到 SMEM 之间的数据拷贝,并自动做 Double Buffer 或者 N Buffer 的优化。
最简单的 Double buffer 的伪代码如下
A = alloc_tensor(shape=[2*16,16])
# cp.async & cp.async.commit_group
A = insert_slice_async(A, ptr0, 0)
B = alloc_tensor(shape=[2*16,8])
B = insert_slice_async(B, ptr1, 0)
A = insert_slice_async(A, ptr00, 1)
B = insert_slice_async(B, ptr11, 0)
async_wait(num=2) # cp.async.wait_group
A_slice0 = extract_slice(A, offset=(0,0,0), size=(1,16,16))
B_slice0 = extract_slice(B, offset=(0,0,0), size=(1,16,8))
for i in range(...):
a = ldmatrix(A_slice0)
b = ldmatrix(B_slice0)
c = dot(a, b)
offset = (i+1) % 2
A = insert_slice_async(A, ptr2, offset)
B = insert_slice_async(B, ptr3, offset)
async_wait(num=2)
A_slice0 = extract_slice(A, offset=(offset,0,0), size=(1,16,16))
B_slice0 = extract_slice(B, offset=(offset,0,0), size=(1,16,8))
其中,
alloc_tensor大致对应到triton_gpu.alloc_tensorinsert_slice_async对应到triton_gpu.insert_slice_async, 表示异步地向 Tensor 中插入一个 slice,这个过程是通过cp.async指令实现的异步tensor.extract_slice表示从 Tensor 中读取一个 sliceasync_wait的语义对应到cp.async.wait_group指令
Prefetch Pass
Prefetch 的逻辑跟 Pipeline Pass 基本类似,也是 Double buffer 和 N Buffer 的优化,区别是其承担了 SMEM 到 register file 的数据搬运,IR 的表示方式是 triton_gpu.convert_layout %37 : (tensor<16x16xf16, #blocked0>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>> , 最终映射的核心指令是 ldmatrix 。
高性能 LLVM 生成之 Backend
Triton 的 Backend 可以有微观和宏观两个角度
- 微观上主要包括
TritonGPU IR -> LLVM Dialect的过程,这里需要注意的是,LLVM Dialect 是 MLIR 体系中的一个表示,其可以进一步自动 lower 到 LLVM IR - 宏观上进一步包括了 LLVM Dialect -> LLVM IR -> PTX -> cubin 等过程
这里我们只从微观角度介绍,因为宏观角度中,大部分流程可以通过 LLVM 社区或者 CUDA 的一些设施自动完成。
Triton 的 Backend 是比较经典的 MLIR 的 Lowering,主要内容就是将 TritonGPU IR 中包含的每种 Op 逐个的 OpConversion。 不过为了高性能,以及保证 Codegen 产物的可控,Triton 在 LLVM 中大量插入了 PTX 的内联汇编(下文会介绍)。 此外,大部分 Op 的 Lowering 都是比较规则化,下文会简要介绍 Dot 指令的 Lowering。
PTX inline asm
Triton 中使用 Inline asm 大致几个原因:
- 一些指令对应的操作在现有的
gpu和nvgpu的 dialect 还不太完善 - 性能原因,比如浮点类型间的变换,一小块汇编足以;借助一个很长的 workflow 还不太可控
Triton 里面针对 Inline asm 的封装有个简单的 wrapper,类似最简单的 cp.async.wait_group 的调用
PTXBuilder ptxBuilder;
auto &asyncWaitOp = *ptxBuilder.create<>("cp.async.wait_group");
auto num = op->getAttrOfType<IntegerAttr>("num").getInt();
asyncWaitOp(ptxBuilder.newConstantOperand(num));
到稍微复杂点的 ld 的各种参数组合
auto &ld = ptxBuilder.create<>("ld")
->o("volatile", op.getIsVolatile())
.global()
.o("ca", op.getCache() == triton::CacheModifier::CA)
.o("cg", op.getCache() == triton::CacheModifier::CG)
.o("L1::evict_first",
op.getEvict() == triton::EvictionPolicy::EVICT_FIRST)
.o("L1::evict_last",
op.getEvict() == triton::EvictionPolicy::EVICT_LAST)
.o("L1::cache_hint", hasL2EvictPolicy)
.v(nWords)
.b(width);
MMA 指令生成
相比于 ReduceOp 等需要跟 layout 结合的 Op 的 Lowering,DotOp 的是规则非常清晰的。
这里大致提下在 Backend,一个 Dot 的工作流涉及的阶段和 Op:
| Stage | Op | Layout | |
|---|---|---|---|
| 2 | Load $a, $b 的 tile 到 SMEM | triton_gpu.insert_slice_async | #shared |
| 3 | 从 SMEM Load 参数到 Register file | tensor.extract_slice | #dot_op |
| 4 | 执行 MMA,结果会在 Registter file | tt.dot | #mma |
所以直接跟 MMA 指令相关的其实只在第 4 步,其需要的 \(a\), \(b\) 两个参数已经通过 tensor.extract_slice 拷贝到了 Register file,直接满足了 Ampere 上的 mma 指令的需求。
在 Ampere 架构上,一个 DotOp 会映射到多个 mma 指令,下面我们以 FP16 的 mma.m16n8k16 指令为例,具体的任务设置如下
- Dot 计算的 tile 的尺寸是 M=32, N=16, K=16
- 对应着
mma.m16n8k16指令的尺寸是M=16, N=8, K=16,因此一个 tile 需要在 m, n, k 方向展开2x2x1总共 4 个mma.m16n8k16指令
- 对应着
最终会有类似如下的代码
for (unsigned k = 0; k < numK; ++k)
for (unsigned m = 0; m < numM; ++m)
for (unsigned n = 0; n < numN; ++n) {
callMMA(m, n, k);
}
其中,numM, numN, numK 就对应着上面的 2, 2, 1。
callMMA 的代码如上文时候 InlineAsm,类似如下代码
auto mma = builder.create("mma.sync.aligned.m8n8k4")
->o(isARow ? "row" : "col")
.o(isBRow ? "row" : "col")
.o("f32.f16.f16.f32");
mma(resOprs, AOprs, BOprs, COprs);
FYI
- Triton MLIR migration code
- Triton paper: Triton: An Intermediate Language and Compiler forTiled Neural Network Computations
GEMM 在 Optimizer Pass 效果
下面列举了经典的 GEMM 在 Triton 的 Compile pipeline 里面的 IR 的变换。
Python code
def matmul_kernel(
a_ptr, b_ptr, c_ptr,
stride_am, stride_ak,
stride_bk, stride_bn,
stride_cm, stride_cn,
M: tl.constexpr, N: tl.constexpr, K: tl.constexpr,
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr,
BLOCK_SIZE_K: tl.constexpr,
):
offs_m = tl.arange(0, BLOCK_SIZE_M)
offs_n = tl.arange(0, BLOCK_SIZE_N)
offs_k = tl.arange(0, BLOCK_SIZE_K)
a_ptrs = a_ptr + offs_m[:, None] * stride_am + offs_k[None, :] * stride_ak
b_ptrs = b_ptr + offs_k[:, None] * stride_bk + offs_n[None, :] * stride_bn
accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
for k in range(0, K, BLOCK_SIZE_K):
a = tl.load(a_ptrs)
b = tl.load(b_ptrs)
accumulator += tl.dot(a, b)
a_ptrs += BLOCK_SIZE_K * stride_ak
b_ptrs += BLOCK_SIZE_K * stride_bk
c_ptrs = c_ptr + offs_m[:, None] * stride_cm + offs_n[None, :] * stride_cn
tl.store(c_ptrs, accumulator)
Triton IR translated from Python AST(and after Inliner, CES … passes)
这一步算是 Python code 直接翻译到了 Triton IR.
func public @matmul_kernel_0d1d2d3d4c56c78c(%arg0: !tt.ptr<f16> {tt.divisibility = 16 : i32}, %arg1: !tt.ptr<f16> {tt.divisibility = 16 : i32}, %arg2: !tt.ptr<f32> {tt.divisibility = 16 : i32}, %arg3: i32 {tt.divisibility = 16 : i32}, %arg4: i32, %arg5: i32) {
%cst = arith.constant dense<0.000000e+00> : tensor<16x8xf32>
%c0 = arith.constant 0 : index
%c64 = arith.constant 64 : index
%c16 = arith.constant 16 : index
%cst_0 = arith.constant dense<16> : tensor<16x16xi32>
%c16_i32 = arith.constant 16 : i32
%0 = tt.make_range {end = 16 : i32, start = 0 : i32} : tensor<16xi32>
%1 = tt.make_range {end = 8 : i32, start = 0 : i32} : tensor<8xi32>
%2 = tt.expand_dims %0 {axis = 1 : i32} : (tensor<16xi32>) -> tensor<16x1xi32>
%3 = tt.splat %arg3 : (i32) -> tensor<16x1xi32>
%4 = arith.muli %2, %3 : tensor<16x1xi32>
%5 = tt.splat %arg0 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>>
%6 = tt.addptr %5, %4 : tensor<16x1x!tt.ptr<f16>>
%7 = tt.expand_dims %0 {axis = 0 : i32} : (tensor<16xi32>) -> tensor<1x16xi32>
%8 = tt.broadcast %6 : (tensor<16x1x!tt.ptr<f16>>) -> tensor<16x16x!tt.ptr<f16>>
%9 = tt.broadcast %7 : (tensor<1x16xi32>) -> tensor<16x16xi32>
%10 = tt.addptr %8, %9 : tensor<16x16x!tt.ptr<f16>>
%11 = tt.splat %arg4 : (i32) -> tensor<16x1xi32>
%12 = arith.muli %2, %11 : tensor<16x1xi32>
%13 = tt.splat %arg1 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>>
%14 = tt.addptr %13, %12 : tensor<16x1x!tt.ptr<f16>>
%15 = tt.expand_dims %1 {axis = 0 : i32} : (tensor<8xi32>) -> tensor<1x8xi32>
%16 = tt.broadcast %14 : (tensor<16x1x!tt.ptr<f16>>) -> tensor<16x8x!tt.ptr<f16>>
%17 = tt.broadcast %15 : (tensor<1x8xi32>) -> tensor<16x8xi32>
%18 = tt.addptr %16, %17 : tensor<16x8x!tt.ptr<f16>>
%19:3 = scf.for %arg6 = %c0 to %c64 step %c16 iter_args(%arg7 = %cst, %arg8 = %10, %arg9 = %18) -> (tensor<16x8xf32>, tensor<16x16x!tt.ptr<f16>>, tensor<16x8x!tt.ptr<f16>>) {
%26 = tt.load %arg8 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16xf16>
%27 = tt.load %arg9 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8xf16>
%28 = tt.dot %26, %27, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16> * tensor<16x8xf16> -> tensor<16x8xf32>
%29 = tt.addptr %arg8, %cst_0 : tensor<16x16x!tt.ptr<f16>>
%30 = arith.muli %arg4, %c16_i32 : i32
%31 = tt.splat %30 : (i32) -> tensor<16x8xi32>
%32 = tt.addptr %arg9, %31 : tensor<16x8x!tt.ptr<f16>>
scf.yield %28, %29, %32 : tensor<16x8xf32>, tensor<16x16x!tt.ptr<f16>>, tensor<16x8x!tt.ptr<f16>>
}
%20 = tt.splat %arg5 : (i32) -> tensor<16x1xi32>
%21 = arith.muli %2, %20 : tensor<16x1xi32>
%22 = tt.splat %arg2 : (!tt.ptr<f32>) -> tensor<16x1x!tt.ptr<f32>>
%23 = tt.addptr %22, %21 : tensor<16x1x!tt.ptr<f32>>
%24 = tt.broadcast %23 : (tensor<16x1x!tt.ptr<f32>>) -> tensor<16x8x!tt.ptr<f32>>
%25 = tt.addptr %24, %17 : tensor<16x8x!tt.ptr<f32>>
tt.store %25, %19#0 : tensor<16x8xf32>
return
}
IR Before LoopInvariantCodeMotion
func public @matmul_kernel_0d1d2d3d4c56c78c(%arg0: !tt.ptr<f16> {tt.divisibility = 16 : i32}, %arg1: !tt.ptr<f16> {tt.divisibility = 16 : i32}, %arg2: !tt.ptr<f32> {tt.divisibility = 16 : i32}, %arg3: i32 {tt.divisibility = 16 : i32}, %arg4: i32, %arg5: i32) {
%cst = arith.constant dense<0.000000e+00> : tensor<16x8xf32>
%c0 = arith.constant 0 : index
%c64 = arith.constant 64 : index
%c16 = arith.constant 16 : index
%cst_0 = arith.constant dense<16> : tensor<16x16xi32>
%c16_i32 = arith.constant 16 : i32
%0 = tt.make_range {end = 16 : i32, start = 0 : i32} : tensor<16xi32>
%1 = tt.make_range {end = 8 : i32, start = 0 : i32} : tensor<8xi32>
%2 = tt.expand_dims %0 {axis = 1 : i32} : (tensor<16xi32>) -> tensor<16x1xi32>
%3 = tt.splat %arg3 : (i32) -> tensor<16x1xi32>
%4 = arith.muli %2, %3 : tensor<16x1xi32>
%5 = tt.splat %arg0 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>>
%6 = tt.addptr %5, %4 : tensor<16x1x!tt.ptr<f16>>
%7 = tt.expand_dims %0 {axis = 0 : i32} : (tensor<16xi32>) -> tensor<1x16xi32>
%8 = tt.broadcast %6 : (tensor<16x1x!tt.ptr<f16>>) -> tensor<16x16x!tt.ptr<f16>>
%9 = tt.broadcast %7 : (tensor<1x16xi32>) -> tensor<16x16xi32>
%10 = tt.addptr %8, %9 : tensor<16x16x!tt.ptr<f16>>
%11 = tt.splat %arg4 : (i32) -> tensor<16x1xi32>
%12 = arith.muli %2, %11 : tensor<16x1xi32>
%13 = tt.splat %arg1 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>>
%14 = tt.addptr %13, %12 : tensor<16x1x!tt.ptr<f16>>
%15 = tt.expand_dims %1 {axis = 0 : i32} : (tensor<8xi32>) -> tensor<1x8xi32>
%16 = tt.broadcast %14 : (tensor<16x1x!tt.ptr<f16>>) -> tensor<16x8x!tt.ptr<f16>>
%17 = tt.broadcast %15 : (tensor<1x8xi32>) -> tensor<16x8xi32>
%18 = tt.addptr %16, %17 : tensor<16x8x!tt.ptr<f16>>
%19:3 = scf.for %arg6 = %c0 to %c64 step %c16 iter_args(%arg7 = %cst, %arg8 = %10, %arg9 = %18) -> (tensor<16x8xf32>, tensor<16x16x!tt.ptr<f16>>, tensor<16x8x!tt.ptr<f16>>) {
%26 = tt.load %arg8 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16xf16>
%27 = tt.load %arg9 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8xf16>
%28 = tt.dot %26, %27, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16> * tensor<16x8xf16> -> tensor<16x8xf32>
%29 = tt.addptr %arg8, %cst_0 : tensor<16x16x!tt.ptr<f16>>
%30 = arith.muli %arg4, %c16_i32 : i32
%31 = tt.splat %30 : (i32) -> tensor<16x8xi32>
%32 = tt.addptr %arg9, %31 : tensor<16x8x!tt.ptr<f16>>
scf.yield %28, %29, %32 : tensor<16x8xf32>, tensor<16x16x!tt.ptr<f16>>, tensor<16x8x!tt.ptr<f16>>
}
%20 = tt.splat %arg5 : (i32) -> tensor<16x1xi32>
%21 = arith.muli %2, %20 : tensor<16x1xi32>
%22 = tt.splat %arg2 : (!tt.ptr<f32>) -> tensor<16x1x!tt.ptr<f32>>
%23 = tt.addptr %22, %21 : tensor<16x1x!tt.ptr<f32>>
%24 = tt.broadcast %23 : (tensor<16x1x!tt.ptr<f32>>) -> tensor<16x8x!tt.ptr<f32>>
%25 = tt.addptr %24, %17 : tensor<16x8x!tt.ptr<f32>>
tt.store %25, %19#0 : tensor<16x8xf32>
return
}
可以看到
%30 = arith.muli %arg4, %c16_i32 : i32
%31 = tt.splat %30 : (i32) -> tensor<16x8xi32>
这段计算的输入分别是 function argument 和 constant,不依赖 forloop 内的变量,理论上可以挪出去。
IR After LoopInvariantCodeMotion
LoopInvariantCodeMotion 是 MLIR 社区的一个 Pass,用于将无关 variable 计算挪到 forloop 外面,可以看到上小节里面的计算已经挪出去了。
func public @matmul_kernel_0d1d2d3d4c56c78c(%arg0: !tt.ptr<f16>, %arg1: !tt.ptr<f16>, %arg2: !tt.ptr<f32>, %arg3: i32, %arg4: i32, %arg5: i32) {
%cst = arith.constant dense<0.000000e+00> : tensor<16x8xf32>
%c0 = arith.constant 0 : index
%c64 = arith.constant 64 : index
%c16 = arith.constant 16 : index
%cst_0 = arith.constant dense<16> : tensor<16x16xi32>
%c16_i32 = arith.constant 16 : i32
%0 = tt.make_range {end = 16 : i32, start = 0 : i32} : tensor<16xi32>
%1 = tt.make_range {end = 8 : i32, start = 0 : i32} : tensor<8xi32>
%2 = tt.expand_dims %0 {axis = 1 : i32} : (tensor<16xi32>) -> tensor<16x1xi32>
%3 = tt.splat %arg3 : (i32) -> tensor<16x1xi32>
%4 = arith.muli %2, %3 : tensor<16x1xi32>
%5 = tt.splat %arg0 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>>
%6 = tt.addptr %5, %4 : tensor<16x1x!tt.ptr<f16>>
%7 = tt.expand_dims %0 {axis = 0 : i32} : (tensor<16xi32>) -> tensor<1x16xi32>
%8 = tt.broadcast %6 : (tensor<16x1x!tt.ptr<f16>>) -> tensor<16x16x!tt.ptr<f16>>
%9 = tt.broadcast %7 : (tensor<1x16xi32>) -> tensor<16x16xi32>
%10 = tt.addptr %8, %9 : tensor<16x16x!tt.ptr<f16>>
%11 = tt.splat %arg4 : (i32) -> tensor<16x1xi32>
%12 = arith.muli %2, %11 : tensor<16x1xi32>
%13 = tt.splat %arg1 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>>
%14 = tt.addptr %13, %12 : tensor<16x1x!tt.ptr<f16>>
%15 = tt.expand_dims %1 {axis = 0 : i32} : (tensor<8xi32>) -> tensor<1x8xi32>
%16 = tt.broadcast %14 : (tensor<16x1x!tt.ptr<f16>>) -> tensor<16x8x!tt.ptr<f16>>
%17 = tt.broadcast %15 : (tensor<1x8xi32>) -> tensor<16x8xi32>
%18 = tt.addptr %16, %17 : tensor<16x8x!tt.ptr<f16>>
%19 = arith.muli %arg4, %c16_i32 : i32
%20 = tt.splat %19 : (i32) -> tensor<16x8xi32>
%21:3 = scf.for %arg6 = %c0 to %c64 step %c16 iter_args(%arg7 = %cst, %arg8 = %10, %arg9 = %18) -> (tensor<16x8xf32>, tensor<16x16x!tt.ptr<f16>>, tensor<16x8x!tt.ptr<f16>>) {
%28 = tt.load %arg8 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16xf16>
%29 = tt.load %arg9 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8xf16>
%30 = tt.dot %28, %29, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16> * tensor<16x8xf16> -> tensor<16x8xf32>
%31 = tt.addptr %arg8, %cst_0 : tensor<16x16x!tt.ptr<f16>>
%32 = tt.addptr %arg9, %20 : tensor<16x8x!tt.ptr<f16>>
scf.yield %30, %31, %32 : tensor<16x8xf32>, tensor<16x16x!tt.ptr<f16>>, tensor<16x8x!tt.ptr<f16>>
}
%22 = tt.splat %arg5 : (i32) -> tensor<16x1xi32>
%23 = arith.muli %2, %22 : tensor<16x1xi32>
%24 = tt.splat %arg2 : (!tt.ptr<f32>) -> tensor<16x1x!tt.ptr<f32>>
%25 = tt.addptr %24, %23 : tensor<16x1x!tt.ptr<f32>>
%26 = tt.broadcast %25 : (tensor<16x1x!tt.ptr<f32>>) -> tensor<16x8x!tt.ptr<f32>>
%27 = tt.addptr %26, %17 : tensor<16x8x!tt.ptr<f32>>
tt.store %27, %21#0 : tensor<16x8xf32>
return
}
IR After ConvertTritonToTritonGPU
这一步是在原有的硬件无关的 Triton IR 基础上加入了 GPU 相关的 data layout 和 operation.
#blocked0 = #triton_gpu.blocked<{sizePerThread = [1], threadsPerWarp = [16], warpsPerCTA = [1], order = [0]}>
#blocked1 = #triton_gpu.blocked<{sizePerThread = [1], threadsPerWarp = [8], warpsPerCTA = [1], order = [0]}>
#blocked2 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [16, 1], warpsPerCTA = [1, 1], order = [0, 1]}>
#blocked3 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [1, 16], warpsPerCTA = [1, 1], order = [0, 1]}>
#blocked4 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [16, 2], warpsPerCTA = [1, 1], order = [0, 1]}>
#blocked5 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [1, 8], warpsPerCTA = [1, 1], order = [0, 1]}>
module attributes {"triton_gpu.num-warps" = 1 : i32} {
func public @matmul_kernel_0d1d2d3d4c56c78c(%arg0: !tt.ptr<f16>, %arg1: !tt.ptr<f16>, %arg2: !tt.ptr<f32>, %arg3: i32, %arg4: i32, %arg5: i32) {
%cst = arith.constant dense<0.000000e+00> : tensor<16x8xf32, |\colorbox{yellow}{\strut #blocked4}|>
%c0 = arith.constant 0 : index
%c64 = arith.constant 64 : index
%c16 = arith.constant 16 : index
%cst_0 = arith.constant dense<16> : tensor<16x16xi32, #blocked4>
%c16_i32 = arith.constant 16 : i32
%0 = tt.make_range {end = 16 : i32, start = 0 : i32} : tensor<16xi32, #blocked0>
%1 = tt.make_range {end = 8 : i32, start = 0 : i32} : tensor<8xi32, #blocked1>
%2 = triton_gpu.convert_layout %0 : (tensor<16xi32, #blocked0>) -> tensor<16xi32, #triton_gpu.slice<{dim = 1, parent = #blocked2}>>
%3 = tt.expand_dims %2 {axis = 1 : i32} : (tensor<16xi32, #triton_gpu.slice<{dim = 1, parent = #blocked2}>>) -> tensor<16x1xi32, #blocked2>
%4 = tt.splat %arg3 : (i32) -> tensor<16x1xi32, #blocked2>
%5 = arith.muli %3, %4 : tensor<16x1xi32, #blocked2>
%6 = tt.splat %arg0 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>, #blocked2>
%7 = tt.addptr %6, %5 : tensor<16x1x!tt.ptr<f16>, #blocked2>
%8 = triton_gpu.convert_layout %0 : (tensor<16xi32, #blocked0>) -> tensor<16xi32, #triton_gpu.slice<{dim = 0, parent = #blocked3}>>
%9 = tt.expand_dims %8 {axis = 0 : i32} : (tensor<16xi32, #triton_gpu.slice<{dim = 0, parent = #blocked3}>>) -> tensor<1x16xi32, #blocked3>
%10 = tt.broadcast %7 : (tensor<16x1x!tt.ptr<f16>, #blocked2>) -> tensor<16x16x!tt.ptr<f16>, #blocked2>
%11 = triton_gpu.convert_layout %10 : (tensor<16x16x!tt.ptr<f16>, #blocked2>) -> tensor<16x16x!tt.ptr<f16>, #blocked4>
%12 = tt.broadcast %9 : (tensor<1x16xi32, #blocked3>) -> tensor<16x16xi32, #blocked3>
%13 = triton_gpu.convert_layout %12 : (tensor<16x16xi32, #blocked3>) -> tensor<16x16xi32, #blocked4>
%14 = tt.addptr %11, %13 : tensor<16x16x!tt.ptr<f16>, #blocked4>
%15 = tt.splat %arg4 : (i32) -> tensor<16x1xi32, #blocked2>
%16 = arith.muli %3, %15 : tensor<16x1xi32, #blocked2>
%17 = tt.splat %arg1 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>, #blocked2>
%18 = tt.addptr %17, %16 : tensor<16x1x!tt.ptr<f16>, #blocked2>
%19 = triton_gpu.convert_layout %1 : (tensor<8xi32, #blocked1>) -> tensor<8xi32, #triton_gpu.slice<{dim = 0, parent = #blocked5}>>
%20 = tt.expand_dims %19 {axis = 0 : i32} : (tensor<8xi32, #triton_gpu.slice<{dim = 0, parent = #blocked5}>>) -> tensor<1x8xi32, #blocked5>
%21 = tt.broadcast %18 : (tensor<16x1x!tt.ptr<f16>, #blocked2>) -> tensor<16x8x!tt.ptr<f16>, #blocked2>
%22 = triton_gpu.convert_layout %21 : (tensor<16x8x!tt.ptr<f16>, #blocked2>) -> tensor<16x8x!tt.ptr<f16>, #blocked4>
%23 = tt.broadcast %20 : (tensor<1x8xi32, #blocked5>) -> tensor<16x8xi32, #blocked5>
%24 = triton_gpu.convert_layout %23 : (tensor<16x8xi32, #blocked5>) -> tensor<16x8xi32, #blocked4>
%25 = tt.addptr %22, %24 : tensor<16x8x!tt.ptr<f16>, #blocked4>
%26 = arith.muli %arg4, %c16_i32 : i32
%27 = tt.splat %26 : (i32) -> tensor<16x8xi32, #blocked4>
%28:3 = scf.for %arg6 = %c0 to %c64 step %c16 iter_args(%arg7 = %cst, %arg8 = %14, %arg9 = %25) -> (tensor<16x8xf32, #blocked4>, tensor<16x16x!tt.ptr<f16>, #blocked4>, tensor<16x8x!tt.ptr<f16>, #blocked4>) {
%36 = tt.load %arg8 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16xf16, #blocked4>
%37 = tt.load %arg9 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8xf16, #blocked4>
%38 = triton_gpu.convert_layout %36 : (tensor<16x16xf16, #blocked4>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #blocked4}>>
%39 = triton_gpu.convert_layout %37 : (tensor<16x8xf16, #blocked4>) -> tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #blocked4}>>
%40 = tt.dot %38, %39, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #blocked4}>> * tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #blocked4}>> -> tensor<16x8xf32, #blocked4>
%41 = tt.addptr %arg8, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked4>
%42 = tt.addptr %arg9, %27 : tensor<16x8x!tt.ptr<f16>, #blocked4>
scf.yield %40, %41, %42 : tensor<16x8xf32, #blocked4>, tensor<16x16x!tt.ptr<f16>, #blocked4>, tensor<16x8x!tt.ptr<f16>, #blocked4>
}
%29 = tt.splat %arg5 : (i32) -> tensor<16x1xi32, #blocked2>
%30 = arith.muli %3, %29 : tensor<16x1xi32, #blocked2>
%31 = tt.splat %arg2 : (!tt.ptr<f32>) -> tensor<16x1x!tt.ptr<f32>, #blocked2>
%32 = tt.addptr %31, %30 : tensor<16x1x!tt.ptr<f32>, #blocked2>
%33 = tt.broadcast %32 : (tensor<16x1x!tt.ptr<f32>, #blocked2>) -> tensor<16x8x!tt.ptr<f32>, #blocked2>
%34 = triton_gpu.convert_layout %33 : (tensor<16x8x!tt.ptr<f32>, #blocked2>) -> tensor<16x8x!tt.ptr<f32>, #blocked4>
%35 = tt.addptr %34, %24 : tensor<16x8x!tt.ptr<f32>, #blocked4>
tt.store %35, %28#0 : tensor<16x8xf32, #blocked4>
return
}
这里比较明显的是
- 作为 dotOp 的输出,
%40应该是 mma layout,但这一步还是 blocked layout,这个会在下一节里面改写 %38,%39这些的 layout 应该是dot_op<mma>但由于 mma layout 还没有给定,所以还是dot_op<blocked>
IR After TritonGPUCombineOps
这一步会包含很多 Op pattern 的改写,直接的变化是
- 给 dot 相关的增加了 mma 的 data layout
- 插入了 mma layout 相关的
convert_layout
#blocked0 = #triton_gpu.blocked<{sizePerThread = [1, 8], threadsPerWarp = [16, 2], warpsPerCTA = [1, 1], order = [1, 0]}>
#blocked1 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [4, 8], warpsPerCTA = [1, 1], order = [1, 0]}>
#mma = #triton_gpu.mma<{version = 2, warpsPerCTA = [1, 1]}>
module attributes {"triton_gpu.num-warps" = 1 : i32} {
func public @matmul_kernel_0d1d2d3d4c56c78c(%arg0: !tt.ptr<f16> {tt.divisibility = 16 : i32}, %arg1: !tt.ptr<f16> {tt.divisibility = 16 : i32}, %arg2: !tt.ptr<f32> {tt.divisibility = 16 : i32}, %arg3: i32 {tt.divisibility = 16 : i32}, %arg4: i32, %arg5: i32) {
%c0 = arith.constant 0 : index
%c64 = arith.constant 64 : index
%c16 = arith.constant 16 : index
%c16_i32 = arith.constant 16 : i32
%cst = arith.constant dense<0.000000e+00> : tensor<16x8xf32, #mma>
%cst_0 = arith.constant dense<16> : tensor<16x16xi32, #blocked0>
%0 = tt.make_range {end = 16 : i32, start = 0 : i32} : tensor<16xi32, #triton_gpu.slice<{dim = 1, parent = #blocked0}>>
%1 = tt.make_range {end = 16 : i32, start = 0 : i32} : tensor<16xi32, #triton_gpu.slice<{dim = 1, parent = #blocked1}>>
%2 = tt.make_range {end = 16 : i32, start = 0 : i32} : tensor<16xi32, #triton_gpu.slice<{dim = 1, parent = #blocked1}>>
%3 = tt.splat %arg3 : (i32) -> tensor<16x1xi32, #blocked0>
%4 = tt.splat %arg0 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>, #blocked0>
%5 = tt.make_range {end = 16 : i32, start = 0 : i32} : tensor<16xi32, #triton_gpu.slice<{dim = 0, parent = #blocked0}>>
%6 = tt.expand_dims %0 {axis = 1 : i32} : (tensor<16xi32, #triton_gpu.slice<{dim = 1, parent = #blocked0}>>) -> tensor<16x1xi32, #blocked0>
%7 = arith.muli %6, %3 : tensor<16x1xi32, #blocked0>
%8 = tt.addptr %4, %7 : tensor<16x1x!tt.ptr<f16>, #blocked0>
%9 = tt.broadcast %8 : (tensor<16x1x!tt.ptr<f16>, #blocked0>) -> tensor<16x16x!tt.ptr<f16>, #blocked0>
%10 = tt.expand_dims %5 {axis = 0 : i32} : (tensor<16xi32, #triton_gpu.slice<{dim = 0, parent = #blocked0}>>) -> tensor<1x16xi32, #blocked0>
%11 = tt.broadcast %10 : (tensor<1x16xi32, #blocked0>) -> tensor<16x16xi32, #blocked0>
%12 = tt.splat %arg4 : (i32) -> tensor<16x1xi32, #blocked1>
%13 = tt.splat %arg1 : (!tt.ptr<f16>) -> tensor<16x1x!tt.ptr<f16>, #blocked1>
%14 = tt.make_range {end = 8 : i32, start = 0 : i32} : tensor<8xi32, #triton_gpu.slice<{dim = 0, parent = #blocked1}>>
%15 = tt.make_range {end = 8 : i32, start = 0 : i32} : tensor<8xi32, #triton_gpu.slice<{dim = 0, parent = #blocked1}>>
%16 = tt.expand_dims %1 {axis = 1 : i32} : (tensor<16xi32, #triton_gpu.slice<{dim = 1, parent = #blocked1}>>) -> tensor<16x1xi32, #blocked1>
%17 = arith.muli %16, %12 : tensor<16x1xi32, #blocked1>
%18 = tt.addptr %13, %17 : tensor<16x1x!tt.ptr<f16>, #blocked1>
%19 = tt.broadcast %18 : (tensor<16x1x!tt.ptr<f16>, #blocked1>) -> tensor<16x8x!tt.ptr<f16>, #blocked1>
%20 = tt.expand_dims %14 {axis = 0 : i32} : (tensor<8xi32, #triton_gpu.slice<{dim = 0, parent = #blocked1}>>) -> tensor<1x8xi32, #blocked1>
%21 = tt.broadcast %20 : (tensor<1x8xi32, #blocked1>) -> tensor<16x8xi32, #blocked1>
%22 = tt.expand_dims %15 {axis = 0 : i32} : (tensor<8xi32, #triton_gpu.slice<{dim = 0, parent = #blocked1}>>) -> tensor<1x8xi32, #blocked1>
%23 = tt.broadcast %22 : (tensor<1x8xi32, #blocked1>) -> tensor<16x8xi32, #blocked1>
%24 = arith.muli %arg4, %c16_i32 : i32
%25 = tt.splat %24 : (i32) -> tensor<16x8xi32, #blocked1>
%26 = tt.addptr %9, %11 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%27 = tt.addptr %19, %21 : tensor<16x8x!tt.ptr<f16>, #blocked1>
%28:3 = scf.for %arg6 = %c0 to %c64 step %c16 iter_args(%arg7 = %cst, %arg8 = %26, %arg9 = %27) -> (tensor<16x8xf32, #mma>, tensor<16x16x!tt.ptr<f16>, #blocked0>, tensor<16x8x!tt.ptr<f16>, #blocked1>) {
%37 = tt.load %arg8 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16xf16, #blocked0>
%38 = tt.load %arg9 {cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8xf16, #blocked1>
%39 = triton_gpu.convert_layout %37 : (tensor<16x16xf16, #blocked0>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>
%40 = triton_gpu.convert_layout %38 : (tensor<16x8xf16, #blocked1>) -> tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>
%41 = tt.dot %39, %40, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>> * tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>> -> tensor<16x8xf32, #mma>
%42 = tt.addptr %arg8, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%43 = tt.addptr %arg9, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
scf.yield %41, %42, %43 : tensor<16x8xf32, #mma>, tensor<16x16x!tt.ptr<f16>, #blocked0>, tensor<16x8x!tt.ptr<f16>, #blocked1>
}
%29 = tt.splat %arg5 : (i32) -> tensor<16x1xi32, #blocked1>
%30 = tt.splat %arg2 : (!tt.ptr<f32>) -> tensor<16x1x!tt.ptr<f32>, #blocked1>
%31 = tt.expand_dims %2 {axis = 1 : i32} : (tensor<16xi32, #triton_gpu.slice<{dim = 1, parent = #blocked1}>>) -> tensor<16x1xi32, #blocked1>
%32 = arith.muli %31, %29 : tensor<16x1xi32, #blocked1>
%33 = tt.addptr %30, %32 : tensor<16x1x!tt.ptr<f32>, #blocked1>
%34 = tt.broadcast %33 : (tensor<16x1x!tt.ptr<f32>, #blocked1>) -> tensor<16x8x!tt.ptr<f32>, #blocked1>
%35 = tt.addptr %34, %23 : tensor<16x8x!tt.ptr<f32>, #blocked1>
%36 = triton_gpu.convert_layout %28#0 : (tensor<16x8xf32, #mma>) -> tensor<16x8xf32, #blocked1>
tt.store %35, %36 : tensor<16x8xf32, #blocked1>
return
}
IR After TritonGPUPipeline
这一步可以认为是在 global memory -> shared memory 的数据搬运做 Pipeline 优化。
#blocked0 = #triton_gpu.blocked<{sizePerThread = [1, 8], threadsPerWarp = [16, 2], warpsPerCTA = [1, 1], order = [1, 0]}>
#blocked1 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [4, 8], warpsPerCTA = [1, 1], order = [1, 0]}>
#mma = #triton_gpu.mma<{version = 2, warpsPerCTA = [1, 1]}>
#shared0 = #triton_gpu.shared<{vec = 8, perPhase = 4, maxPhase = 2, order = [1, 0]}>
#shared1 = #triton_gpu.shared<{vec = 8, perPhase = 8, maxPhase = 1, order = [1, 0]}>
module attributes {"triton_gpu.num-warps" = 1 : i32} {
func public @matmul_kernel_0d1d2d3d4c56c78c(%arg0: !tt.ptr<f16>, %arg1: !tt.ptr<f16>, %arg2: !tt.ptr<f32>, %arg3: i32, %arg4: i32, %arg5: i32) {
...
%28 = arith.cmpi slt, %c0, %c64 : index
%29 = triton_gpu.alloc_tensor : tensor<3x16x16xf16, #shared0>
%30 = tt.splat %28 : (i1) -> tensor<16x16xi1, #blocked0>
%31 = triton_gpu.insert_slice_async %26, %29, %c0_i32, %30 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16x!tt.ptr<f16>, #blocked0> -> tensor<3x16x16xf16, #shared0>
%32 = triton_gpu.alloc_tensor : tensor<3x16x8xf16, #shared1>
%33 = tt.splat %28 : (i1) -> tensor<16x8xi1, #blocked1>
%34 = triton_gpu.insert_slice_async %27, %32, %c0_i32, %33 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8x!tt.ptr<f16>, #blocked1> -> tensor<3x16x8xf16, #shared1>
%35 = tt.addptr %26, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%36 = tt.addptr %27, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
...
%40 = tt.splat %39 : (i1) -> tensor<16x16xi1, #blocked0>
%41 = triton_gpu.insert_slice_async %35, %31, %37, %40 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16x!tt.ptr<f16>, #blocked0> -> tensor<3x16x16xf16, #shared0>
%42 = tt.splat %39 : (i1) -> tensor<16x8xi1, #blocked1>
%43 = triton_gpu.insert_slice_async %36, %34, %37, %42 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8x!tt.ptr<f16>, #blocked1> -> tensor<3x16x8xf16, #shared1>
%44 = tt.addptr %35, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%45 = tt.addptr %36, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
%c1_i32_1 = arith.constant 1 : i32
%46 = arith.addi %37, %c1_i32_1 : i32
triton_gpu.async_wait {num = 2 : i32}
%c0_i32_2 = arith.constant 0 : i32
%47 = tensor.extract_slice %41[0, 0, 0] [1, 16, 16] [1, 1, 1] : tensor<3x16x16xf16, #shared0> to tensor<16x16xf16, #shared0>
%48 = tensor.extract_slice %43[0, 0, 0] [1, 16, 8] [1, 1, 1] : tensor<3x16x8xf16, #shared1> to tensor<16x8xf16, #shared1>
%c1_i32_3 = arith.constant 1 : i32
%49 = arith.addi %c0_i32_2, %c1_i32_3 : i32
%50:12 = scf.for %arg6 = %c0 to %c64 step %c16 iter_args(%arg7 = %cst, %arg8 = %26, %arg9 = %27, %arg10 = %41, %arg11 = %43, %arg12 = %47, %arg13 = %48, %arg14 = %45, %arg15 = %44, %arg16 = %38, %arg17 = %46, %arg18 = %49) -> (tensor<16x8xf32, #mma>, tensor<16x16x!tt.ptr<f16>, #blocked0>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<3x16x16xf16, #shared0>, tensor<3x16x8xf16, #shared1>, tensor<16x16xf16, #shared0>, tensor<16x8xf16, #shared1>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<16x16x!tt.ptr<f16>, #blocked0>, index, i32, i32) {
%59 = triton_gpu.convert_layout %arg12 : (tensor<16x16xf16, #shared0>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>
%60 = triton_gpu.convert_layout %arg13 : (tensor<16x8xf16, #shared1>) -> tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>
%61 = tt.dot %59, %60, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>> * tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>> -> tensor<16x8xf32, #mma>
%62 = tt.addptr %arg8, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%63 = tt.addptr %arg9, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
%64 = arith.addi %arg16, %c16 : index
%65 = arith.cmpi slt, %64, %c64 : index
%c3_i32 = arith.constant 3 : i32
%66 = arith.remsi %arg17, %c3_i32 : i32
%c3_i32_4 = arith.constant 3 : i32
%67 = arith.remsi %arg18, %c3_i32_4 : i32
%68 = arith.index_cast %67 : i32 to index
%69 = tt.splat %65 : (i1) -> tensor<16x16xi1, #blocked0>
%70 = triton_gpu.insert_slice_async %arg15, %arg10, %66, %69 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16x!tt.ptr<f16>, #blocked0> -> tensor<3x16x16xf16, #shared0>
%71 = tt.splat %65 : (i1) -> tensor<16x8xi1, #blocked1>
%72 = triton_gpu.insert_slice_async %arg14, %arg11, %66, %71 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8x!tt.ptr<f16>, #blocked1> -> tensor<3x16x8xf16, #shared1>
%73 = tt.addptr %arg15, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%74 = tt.addptr %arg14, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
triton_gpu.async_wait {num = 2 : i32}
%75 = tensor.extract_slice %70[%68, 0, 0] [1, 16, 16] [1, 1, 1] : tensor<3x16x16xf16, #shared0> to tensor<16x16xf16, #shared0>
%76 = tensor.extract_slice %72[%68, 0, 0] [1, 16, 8] [1, 1, 1] : tensor<3x16x8xf16, #shared1> to tensor<16x8xf16, #shared1>
%c1_i32_5 = arith.constant 1 : i32
%77 = arith.addi %arg17, %c1_i32_5 : i32
%c1_i32_6 = arith.constant 1 : i32
%78 = arith.addi %arg18, %c1_i32_6 : i32
scf.yield %61, %62, %63, %70, %72, %75, %76, %74, %73, %64, %77, %78 : tensor<16x8xf32, #mma>, tensor<16x16x!tt.ptr<f16>, #blocked0>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<3x16x16xf16, #shared0>, tensor<3x16x8xf16, #shared1>, tensor<16x16xf16, #shared0>, tensor<16x8xf16, #shared1>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<16x16x!tt.ptr<f16>, #blocked0>, index, i32, i32
}
...
return
}
}
IR Before TritonGPUPrefetch
#blocked0 = #triton_gpu.blocked<{sizePerThread = [1, 8], threadsPerWarp = [16, 2], warpsPerCTA = [1, 1], order = [1, 0]}>
#blocked1 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [4, 8], warpsPerCTA = [1, 1], order = [1, 0]}>
#mma = #triton_gpu.mma<{version = 2, warpsPerCTA = [1, 1]}>
#shared0 = #triton_gpu.shared<{vec = 8, perPhase = 4, maxPhase = 2, order = [1, 0]}>
#shared1 = #triton_gpu.shared<{vec = 8, perPhase = 8, maxPhase = 1, order = [1, 0]}>
module attributes {"triton_gpu.num-warps" = 1 : i32} {
func public @matmul_kernel_0d1d2d3d4c56c78c(%arg0: !tt.ptr<f16>, %arg1: !tt.ptr<f16>, %arg2: !tt.ptr<f32>, %arg3: i32, %arg4: i32, %arg5: i32) {
...
%28 = arith.cmpi slt, %c0, %c64 : index
%29 = triton_gpu.alloc_tensor : tensor<3x16x16xf16, #shared0>
%30 = tt.splat %28 : (i1) -> tensor<16x16xi1, #blocked0>
%31 = triton_gpu.insert_slice_async %26, %29, %c0_i32, %30 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16x!tt.ptr<f16>, #blocked0> -> tensor<3x16x16xf16, #shared0>
%32 = triton_gpu.alloc_tensor : tensor<3x16x8xf16, #shared1>
%33 = tt.splat %28 : (i1) -> tensor<16x8xi1, #blocked1>
%34 = triton_gpu.insert_slice_async %27, %32, %c0_i32, %33 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8x!tt.ptr<f16>, #blocked1> -> tensor<3x16x8xf16, #shared1>
%35 = tt.addptr %26, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%36 = tt.addptr %27, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
...
%40 = tt.splat %39 : (i1) -> tensor<16x16xi1, #blocked0>
%41 = triton_gpu.insert_slice_async %35, %31, %37, %40 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16x!tt.ptr<f16>, #blocked0> -> tensor<3x16x16xf16, #shared0>
%42 = tt.splat %39 : (i1) -> tensor<16x8xi1, #blocked1>
%43 = triton_gpu.insert_slice_async %36, %34, %37, %42 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8x!tt.ptr<f16>, #blocked1> -> tensor<3x16x8xf16, #shared1>
%44 = tt.addptr %35, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%45 = tt.addptr %36, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
%c1_i32_1 = arith.constant 1 : i32
%46 = arith.addi %37, %c1_i32_1 : i32
triton_gpu.async_wait {num = 2 : i32}
%c0_i32_2 = arith.constant 0 : i32
%47 = tensor.extract_slice %41[0, 0, 0] [1, 16, 16] [1, 1, 1] : tensor<3x16x16xf16, #shared0> to tensor<16x16xf16, #shared0>
%48 = tensor.extract_slice %43[0, 0, 0] [1, 16, 8] [1, 1, 1] : tensor<3x16x8xf16, #shared1> to tensor<16x8xf16, #shared1>
%c1_i32_3 = arith.constant 1 : i32
%49 = arith.addi %c0_i32_2, %c1_i32_3 : i32
%50:12 = scf.for %arg6 = %c0 to %c64 step %c16 iter_args(%arg7 = %cst, %arg8 = %26, %arg9 = %27, %arg10 = %41, %arg11 = %43, %arg12 = %47, %arg13 = %48, %arg14 = %45, %arg15 = %44, %arg16 = %38, %arg17 = %46, %arg18 = %49) -> (tensor<16x8xf32, #mma>, tensor<16x16x!tt.ptr<f16>, #blocked0>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<3x16x16xf16, #shared0>, tensor<3x16x8xf16, #shared1>, tensor<16x16xf16, #shared0>, tensor<16x8xf16, #shared1>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<16x16x!tt.ptr<f16>, #blocked0>, index, i32, i32) {
%59 = triton_gpu.convert_layout %arg12 : (tensor<16x16xf16, #shared0>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>
%60 = triton_gpu.convert_layout %arg13 : (tensor<16x8xf16, #shared1>) -> tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>
%61 = tt.dot %59, %60, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>> * tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>> -> tensor<16x8xf32, #mma>
%62 = tt.addptr %arg8, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%63 = tt.addptr %arg9, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
%64 = arith.addi %arg16, %c16 : index
%65 = arith.cmpi slt, %64, %c64 : index
%c3_i32 = arith.constant 3 : i32
%66 = arith.remsi %arg17, %c3_i32 : i32
%c3_i32_4 = arith.constant 3 : i32
%67 = arith.remsi %arg18, %c3_i32_4 : i32
%68 = arith.index_cast %67 : i32 to index
%69 = tt.splat %65 : (i1) -> tensor<16x16xi1, #blocked0>
%70 = triton_gpu.insert_slice_async %arg15, %arg10, %66, %69 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16x!tt.ptr<f16>, #blocked0> -> tensor<3x16x16xf16, #shared0>
%71 = tt.splat %65 : (i1) -> tensor<16x8xi1, #blocked1>
%72 = triton_gpu.insert_slice_async %arg14, %arg11, %66, %71 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8x!tt.ptr<f16>, #blocked1> -> tensor<3x16x8xf16, #shared1>
%73 = tt.addptr %arg15, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%74 = tt.addptr %arg14, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
triton_gpu.async_wait {num = 2 : i32}
%75 = tensor.extract_slice %70[%68, 0, 0] [1, 16, 16] [1, 1, 1] : tensor<3x16x16xf16, #shared0> to tensor<16x16xf16, #shared0>
%76 = tensor.extract_slice %72[%68, 0, 0] [1, 16, 8] [1, 1, 1] : tensor<3x16x8xf16, #shared1> to tensor<16x8xf16, #shared1>
%c1_i32_5 = arith.constant 1 : i32
%77 = arith.addi %arg17, %c1_i32_5 : i32
%c1_i32_6 = arith.constant 1 : i32
%78 = arith.addi %arg18, %c1_i32_6 : i32
scf.yield %61, %62, %63, %70, %72, %75, %76, %74, %73, %64, %77, %78 : tensor<16x8xf32, #mma>, tensor<16x16x!tt.ptr<f16>, #blocked0>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<3x16x16xf16, #shared0>, tensor<3x16x8xf16, #shared1>, tensor<16x16xf16, #shared0>, tensor<16x8xf16, #shared1>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<16x16x!tt.ptr<f16>, #blocked0>, index, i32, i32
}
...
return
}
}
IR After TritonGPUPrefetch
这一步可以认为是在 Dot 相关的 shared memory -> registers 的数据搬运阶段做 Pipepline 优化。
#blocked0 = #triton_gpu.blocked<{sizePerThread = [1, 8], threadsPerWarp = [16, 2], warpsPerCTA = [1, 1], order = [1, 0]}>
#blocked1 = #triton_gpu.blocked<{sizePerThread = [1, 1], threadsPerWarp = [4, 8], warpsPerCTA = [1, 1], order = [1, 0]}>
#mma = #triton_gpu.mma<{version = 2, warpsPerCTA = [1, 1]}>
#shared0 = #triton_gpu.shared<{vec = 8, perPhase = 4, maxPhase = 2, order = [1, 0]}>
#shared1 = #triton_gpu.shared<{vec = 8, perPhase = 8, maxPhase = 1, order = [1, 0]}>
module attributes {"triton_gpu.num-warps" = 1 : i32} {
func public @matmul_kernel_0d1d2d3d4c56c78c(%arg0: !tt.ptr<f16> {tt.divisibility = 16 : i32}, %arg1: !tt.ptr<f16> {tt.divisibility = 16 : i32}, %arg2: !tt.ptr<f32> {tt.divisibility = 16 : i32}, %arg3: i32 {tt.divisibility = 16 : i32}, %arg4: i32, %arg5: i32) {
...
triton_gpu.async_wait {num = 2 : i32}
%c0_i32_2 = arith.constant 0 : i32
%47 = tensor.extract_slice %41[0, 0, 0] [1, 16, 16] [1, 1, 1] : tensor<3x16x16xf16, #shared0> to tensor<16x16xf16, #shared0>
%48 = tensor.extract_slice %43[0, 0, 0] [1, 16, 8] [1, 1, 1] : tensor<3x16x8xf16, #shared1> to tensor<16x8xf16, #shared1>
%c1_i32_3 = arith.constant 1 : i32
%49 = arith.addi %c0_i32_2, %c1_i32_3 : i32
%50 = tensor.extract_slice %47[0, 0] [16, 16] [1, 1] : tensor<16x16xf16, #shared0> to tensor<16x16xf16, #shared0>
%51 = triton_gpu.convert_layout %50 : (tensor<16x16xf16, #shared0>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>
%52 = tensor.extract_slice %48[0, 0] [16, 8] [1, 1] : tensor<16x8xf16, #shared1> to tensor<16x8xf16, #shared1>
%53 = triton_gpu.convert_layout %52 : (tensor<16x8xf16, #shared1>) -> tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>
%54:14 = scf.for %arg6 = %c0 to %c64 step %c16 iter_args(%arg7 = %cst, %arg8 = %26, %arg9 = %27, %arg10 = %41, %arg11 = %43, %arg12 = %47, %arg13 = %48, %arg14 = %45, %arg15 = %44, %arg16 = %38, %arg17 = %46, %arg18 = %49, %arg19 = %51, %arg20 = %53) -> (tensor<16x8xf32, #mma>, tensor<16x16x!tt.ptr<f16>, #blocked0>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<3x16x16xf16, #shared0>, tensor<3x16x8xf16, #shared1>, tensor<16x16xf16, #shared0>, tensor<16x8xf16, #shared1>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<16x16x!tt.ptr<f16>, #blocked0>, index, i32, i32, tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>, tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>) {
%63 = triton_gpu.convert_layout %arg12 : (tensor<16x16xf16, #shared0>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>
%64 = triton_gpu.convert_layout %arg13 : (tensor<16x8xf16, #shared1>) -> tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>
%65 = tt.dot %63, %64, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>> * tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>> -> tensor<16x8xf32, #mma>
%66 = tt.dot %arg19, %arg20, %arg7 {allowTF32 = true, transA = false, transB = false} : tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>> * tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>> -> tensor<16x8xf32, #mma>
%67 = tt.addptr %arg8, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%68 = tt.addptr %arg9, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
%69 = arith.addi %arg16, %c16 : index
%70 = arith.cmpi slt, %69, %c64 : index
%c3_i32 = arith.constant 3 : i32
%71 = arith.remsi %arg17, %c3_i32 : i32
%c3_i32_4 = arith.constant 3 : i32
%72 = arith.remsi %arg18, %c3_i32_4 : i32
%73 = arith.index_cast %72 : i32 to index
%74 = tt.splat %70 : (i1) -> tensor<16x16xi1, #blocked0>
%75 = triton_gpu.insert_slice_async %arg15, %arg10, %71, %74 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x16x!tt.ptr<f16>, #blocked0> -> tensor<3x16x16xf16, #shared0>
%76 = tt.splat %70 : (i1) -> tensor<16x8xi1, #blocked1>
%77 = triton_gpu.insert_slice_async %arg14, %arg11, %71, %76 {axis = 0 : i32, cache = 1 : i32, evict = 1 : i32, isVolatile = false} : tensor<16x8x!tt.ptr<f16>, #blocked1> -> tensor<3x16x8xf16, #shared1>
%78 = tt.addptr %arg15, %cst_0 : tensor<16x16x!tt.ptr<f16>, #blocked0>
%79 = tt.addptr %arg14, %25 : tensor<16x8x!tt.ptr<f16>, #blocked1>
triton_gpu.async_wait {num = 2 : i32}
%80 = tensor.extract_slice %75[%73, 0, 0] [1, 16, 16] [1, 1, 1] : tensor<3x16x16xf16, #shared0> to tensor<16x16xf16, #shared0>
%81 = tensor.extract_slice %77[%73, 0, 0] [1, 16, 8] [1, 1, 1] : tensor<3x16x8xf16, #shared1> to tensor<16x8xf16, #shared1>
%c1_i32_5 = arith.constant 1 : i32
%82 = arith.addi %arg17, %c1_i32_5 : i32
%c1_i32_6 = arith.constant 1 : i32
%83 = arith.addi %arg18, %c1_i32_6 : i32
%84 = tensor.extract_slice %80[0, 0] [16, 16] [1, 1] : tensor<16x16xf16, #shared0> to tensor<16x16xf16, #shared0>
%85 = triton_gpu.convert_layout %84 : (tensor<16x16xf16, #shared0>) -> tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>
%86 = tensor.extract_slice %81[0, 0] [16, 8] [1, 1] : tensor<16x8xf16, #shared1> to tensor<16x8xf16, #shared1>
%87 = triton_gpu.convert_layout %86 : (tensor<16x8xf16, #shared1>) -> tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>
scf.yield %65, %67, %68, %75, %77, %80, %81, %79, %78, %69, %82, %83, %85, %87 : tensor<16x8xf32, #mma>, tensor<16x16x!tt.ptr<f16>, #blocked0>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<3x16x16xf16, #shared0>, tensor<3x16x8xf16, #shared1>, tensor<16x16xf16, #shared0>, tensor<16x8xf16, #shared1>, tensor<16x8x!tt.ptr<f16>, #blocked1>, tensor<16x16x!tt.ptr<f16>, #blocked0>, index, i32, i32, tensor<16x16xf16, #triton_gpu.dot_op<{opIdx = 0, parent = #mma}>>, tensor<16x8xf16, #triton_gpu.dot_op<{opIdx = 1, parent = #mma}>>
}
...
return
}
}
IR After TritonGPUToLLVM
MLIR 阶段的最后一步就是 translate 到 LLVM dialect,可以看到其中 Triton backend 插入的 Inline Asm。
module attributes {"triton_gpu.num-warps" = 4 : i32, triton_gpu.shared = 36864 : i32} {
llvm.mlir.global external @global_smem() {addr_space = 3 : i32} : !llvm.array<0 x i8>
llvm.func @matmul_kernel_0d1d2d3d4c5d6c7d8c(%arg0: !llvm.ptr<f16, 1> {tt.divisibility = 16 : i32}, %arg1: !llvm.ptr<f16, 1> {tt.divisibility = 16 : i32}, %arg2: !llvm.ptr<f32, 1> {tt.divisibility = 16 : i32}, %arg3: i32 {tt.divisibility = 16 : i32}, %arg4: i32 {tt.divisibility = 16 : i32}, %arg5: i32 {tt.divisibility = 16 : i32}) attributes {nvvm.kernel = 1 : ui1, nvvm.maxntid = 128 : i32, sym_visibility = "public"} {
%0 = llvm.mlir.addressof @global_smem : !llvm.ptr<array<0 x i8>, 3>
%1 = llvm.bitcast %0 : !llvm.ptr<array<0 x i8>, 3> to !llvm.ptr<i8, 3>
%2 = llvm.mlir.constant(3 : i32) : i32
%3 = llvm.mlir.constant(1 : i32) : i32
%4 = llvm.mlir.constant(0 : i32) : i32
%5 = llvm.mlir.constant(2 : i32) : i32
%6 = llvm.mlir.constant(true) : i1
%7 = llvm.mlir.constant(32 : index) : i32
%8 = llvm.mlir.constant(32 : i32) : i32
%9 = llvm.mlir.constant(0.000000e+00 : f32) : f32
...
%567 = llvm.inline_asm has_side_effects asm_dialect = att operand_attrs = [] "ldmatrix.sync.aligned.m8n8.x4.shared.b16 { $0, $1, $2, $3 }, [ $4 + 0 ];", "=r,=r,=r,=r,r" %566 : (!llvm.ptr<f16, 3>) -> !llvm.struct<(vector<2xf16>, vector<2xf16>, vector<2xf16>, vector<2xf16>)>
...
%765 = llvm.inline_asm has_side_effects asm_dialect = att operand_attrs = [] "mma.sync.aligned.m16n8k16.row.col.f32.f16.f16.f32 { $0, $1, $2, $3 }, { $4, $5, $6, $7 }, { $8, $9 }, { $10, $11, $12, $13 };", "=r,=r,=r,=r,r,r,r,r,r,r,0,1,2,3" %677, %679, %678, %680, %685, %686, %701, %702, %703, %704 : (vector<2xf16>, vector<2xf16>, vector<2xf16>, vector<2xf16>, vector<2xf16>, vector<2xf16>, f32, f32, f32, f32) -> !llvm.struct<(f32, f32, f32, f32)>
...
%1789 = llvm.inline_asm has_side_effects asm_dialect = att operand_attrs = [] "@$5 st.global.v4.b32 [ $4 + 0 ], { $0, $1, $2, $3 };", "r,r,r,r,l,b" %1782, %1784, %1786, %1788, %1449, %6 : (i32, i32, i32, i32, !llvm.ptr<f32, 1>, i1) -> !llvm.void
...